I am currently pursuing a Master’s Degree in Robotics Systems Developement (MRSD) at Carnegie Mellon University. As a part of my coursework, I am working on my final Capstone project titled “ARTHuRR (Autonomous Reaming for Total Hip Replacement Robot)”. The objective of this project is to maximize the accuracy of acetabular reaming, while remaining robust during total hip replacement surgery. For the entirety of the project, we follow a systems engineering approach as detailed below. We are currently in the planning phase of the project and will begin working on the technology stack from January 2022. For more recent updates and further details, visit our team website here. My role in this project will be that of the lead perception and sensing engineer as well as software engineer. For more details on the team, click here.
Problem Description
Total Hip Arthroplasty (THA) Surgery as performed in present-day involves the reaming of the acetabulum (pelvis), cutting of the femur, drilling into the femur, placing the cup into the acetabulum, and hammering the prosthesis into the femur. One of the most crucial factors in determining a successful surgery is the accuracy of acetabular cup position and orientation placement, as the correct position and orientation would avoid future dislocation of the hip joint and increase patient comfort. Therefore, it is imperative that surgeons know exactly what orientation and depth they are reaming the acetabulum to.

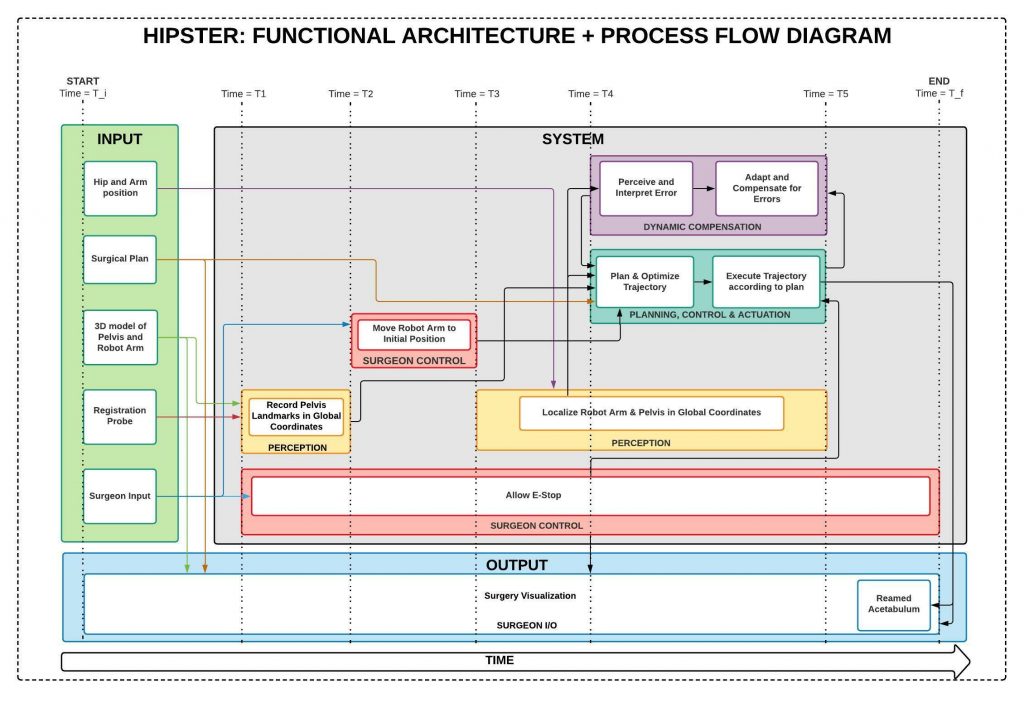
Functional Architecture
The Functional Architecture logically connects the functional requirements of the system with arrows in a diagram as shown below. Furthermore, time markers are included to better show the sequential steps of our functional architecture.
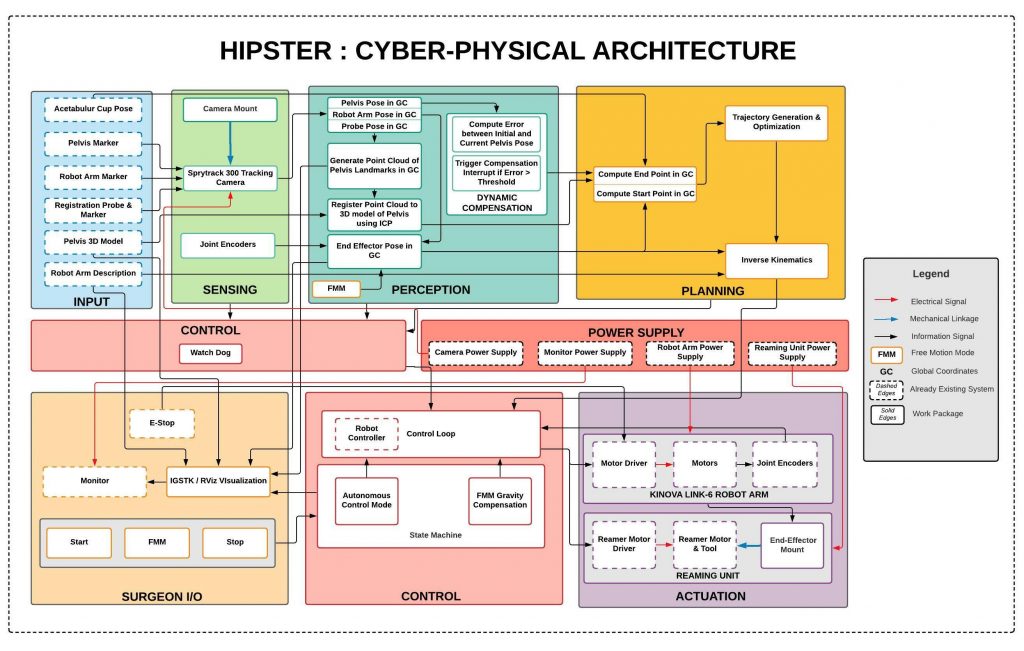
Cyberphysical Architecture
The Cyberphysical Architecture represents a breakdown of the functional architecture and shows the components of the multiple sub-systems and how each component logically connects to each other. The arrows are color-coded depending on the type of relationship is present between blocks.
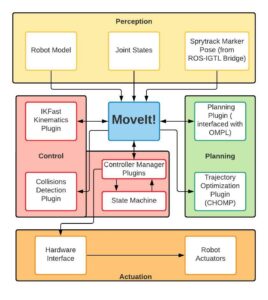
ROS Architecture
The entire system will be built with ROS as the middleware and C++ as the primary programming language. All manipulation-related tasks will be performed using MoveIt! and the following architecture summarizes the relationships and communication between the various sub-modules.