
Meet, HYAAN, the Hydraulically Actuated Autonomous Nurse. HYAAN is a humanoid robot that alleviates nurses of the physical strain associated with lifting and turning unconscious and sedated patients. It was by far the most challenging project we’ve worked on and we’re extremely proud that we could get it to work as we intended. The entire project build was completed from scratch in a span of five days and sleepless nights!
Here’s a little background about the problem:
Several industries today are at a shortage of skilled professionals. Specifically, let’s take look at the health care and nursing sector. By 2030, India will need an estimated 6 million nurses. While the World Health Organization recommends 2.5 nurses for every 1000 patients, India has only 1.6 nurses per 1000 patients on an average. These statistics are relevant to several other developed as well as under developed countries, making this issue a global concern. The nursing staff are the backbone of any hospital. However, we often ignore, let alone acknowledge their incessant hard work every day. They work long shifts and their efficiency plummets towards the end of the day. As a result, there is a need to maximize their efficiency and reduce the number of monotonous tasks that they need to perform. Sedated and unconscious patients in hospitals need constant monitoring and attention. They need to be turned around every 1 or 2 hours to facilitate effective blood circulation throughout their body. This prevents complications like pressure ulcers or bed sores. The main purpose of this project is to automate these tasks so that the physical strain on the nurse is reduced and they can focus on more non-monotonous activities. In addition, patient safety and comfort is also enhanced.
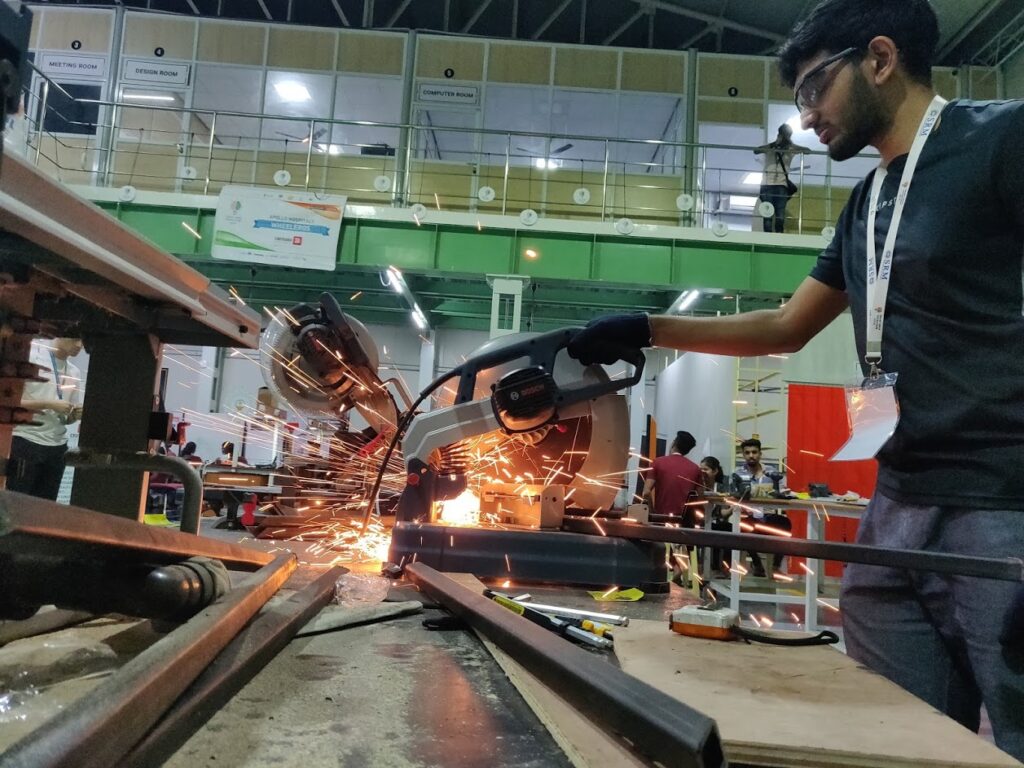
We started by designing the robot on Fusion 360. The main consideration to be taken in this robot was the safety of the patient. We decided to use hydraulic actuators for the design so as to ensure that it doesn’t fail even if the battery/power supply malfunctions. In addition, it can lift heavy loads seamlessly, while providing a small form factor compared to other pneumatic and electric actuators. We also have a vision algorithm installed to ensure that the robot can detect the posture of patient before it can lift or turn them. Once that was done, we then procured raw materials, in our case mild steel, to start building the prototype. The pump and battery were placed to ensure that it acts like a counter-weight to prevent the robot from toppling out of balance when carrying a patient. The biggest challenge in the fabrication was the number of welded joints we had to make, which consumed a lot of time as well as introducing a lot of scope for inaccuracies due to thermal effects. Thankfully, with a lot of consultation, we were able to complete the design successfully. The hydraulics are actuated and controlled using solenoid valves. The nurses can control the robot using voice actuation, capacitive touch sensors and using manual joystick. We are currently working on autonomous navigation so that, if the patient has to transport a patient, all they have to do is verbally command the location, and the robot will navigate to the desired location independently.





Here’s a video that summarizes the background and demonstrates the working of the first prototype of the robot.
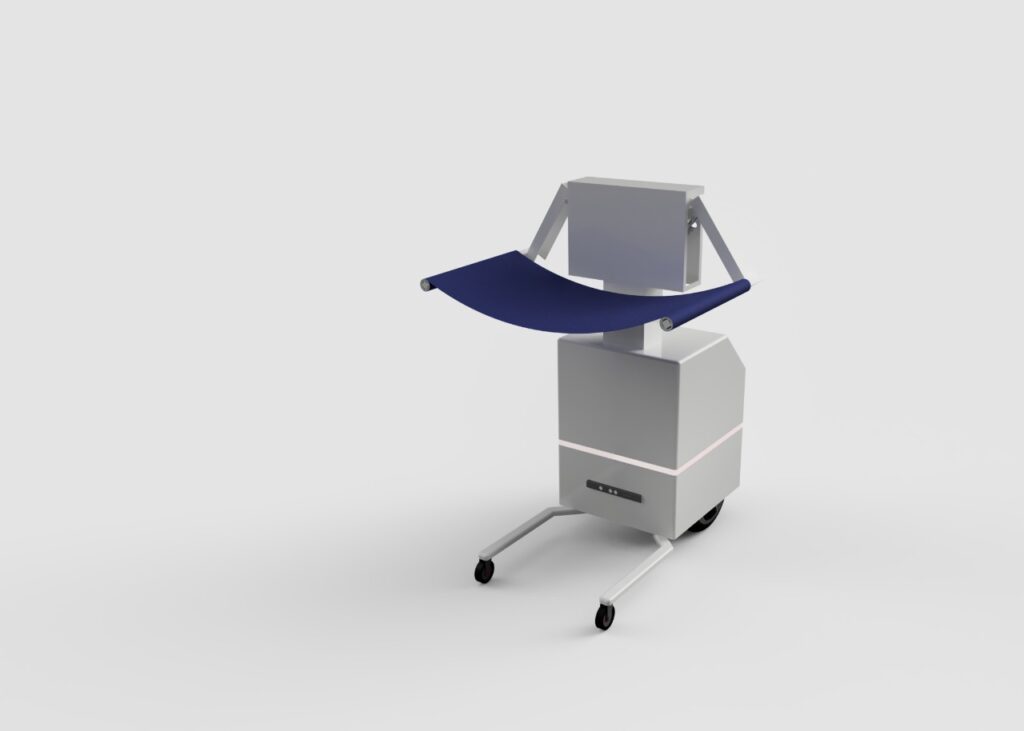
After the first prototype was completed, we received a lot of useful feedback and decided to completely change the mechanical design. Some of the changes we made were as follows:
- The previous model was bulky and welded joints made it difficult to transport, assemble and disassmble. We replaced welded joints wherever possible with fasteners, and made the entire design modular.
- The earlier design also was of a fixed height, and the arm width could not change according to the height of the patient. We modified the new design such that the width of the arms could be changed and the height of the robot can be changed based on the height of the bed.
- Overall improved aesthetics to give the robot a better finished appearance.
The CAD renderings as well as the final fabricated model are as shown in the images below.





















The video below demonstrates the working of the second prototype: